ARENA Lab
Autonomous Robotics & Embodied Neural Agents
Infrastructures & Simulation · Social Robotics · Embodied AI
Directed by Prof. Linh Kästner
We specialize in providing infrastructures and realistic simulation for developing social robotics using foundation models, generative AI, computer vision and many more.
Interested in one of these topics? Reach out to us
See ARENA in Action
From hospital corridors to warehouses and panic-flow crowds — robots trained on the Arena platform deployed across the scenarios that matter.
Last-mile delivery in busy hospital corridors
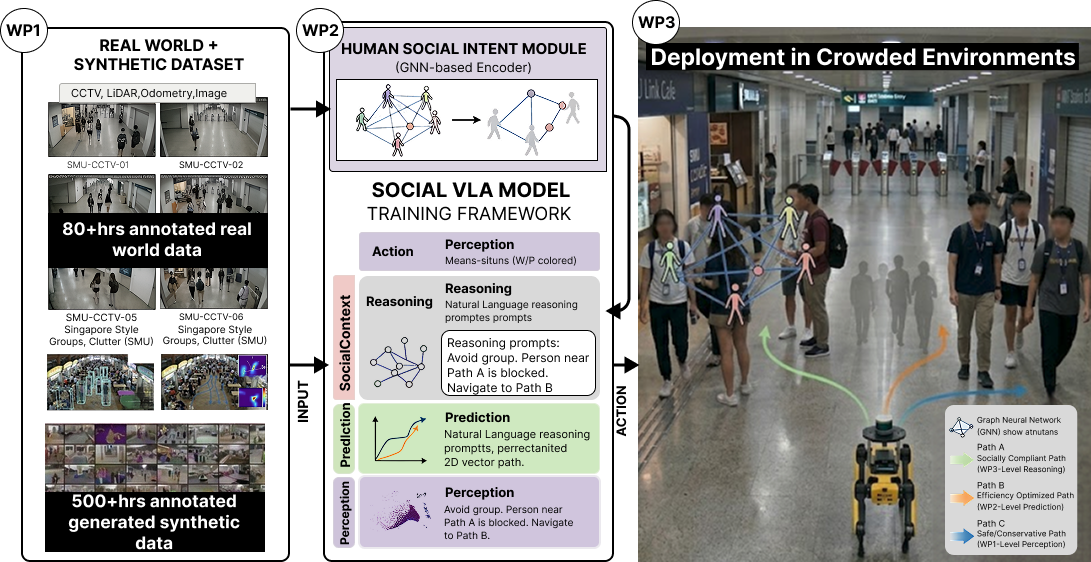
A learning-based planner navigates hospital corridors among nurses, patients, and medical equipment — trained entirely in our photorealistic Arena simulator before sim-to-real deployment.
- Trained in Arena 5.0 photorealistic simulation
- Socially-compliant policy with crowd modelling
- Sim-to-real with zero hand-tuning per site
Developing Social Robotics That Work With and For Humans
Our research spans foundation models, embodied AI, and social robotics — from perception and planning to real-world deployment.
Foundation Models
Vision-Language-Action models enabling robots to understand instructions, reason about scenes, and act in the real world.
Learn more
Embodied AI
Building intelligent agents that perceive and act in the physical world through multi-modal learning and simulation.
Learn more
Social Robotics
Robots that navigate safely and interact naturally with humans in dense, dynamic social environments.
Learn moreSimulation & Digital Twins
Photorealistic simulation environments for training, evaluating, and deploying autonomous robot behaviors.
Learn moreHow to Join ARENA Lab
Explore Topics
Browse our research areas and find what excites you.
Review Positions
Check available positions matching your background.
Complete Screening
Submit a short technical assessment relevant to the role.
Join the Team
Start contributing to cutting-edge robotics research.
Join Our Team
PhD Student (External)
External PhD evaluated on publication count, part or full-time, earning degree with prestigious partner universities.
Postdoctoral Researcher
Lead independent research projects, collaborate with international teams, and contribute to grant proposals. Opportunity to establish yourself as a leading researcher.
Research Intern / Student Assistant
Participate in semester projects or 3-12 months paid internships. Work alongside experienced researchers, contribute to publications at top conferences.
Master Thesis – Generative World Models
Explore generative world models for robot navigation. Investigate how learned world models enhance planning and decision-making.
Student Developer – ARENA Platform
Contribute to the ARENA simulation platform. Develop features, fix bugs, improve documentation.
Recent Papers
Arena-Bench 2.0: A Comprehensive Benchmark of Social Navigation Approaches in Collaborative Environments
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Jiaming Wang, Nhan Trinh, Zhengchen Shen, Giang Nguyen Huu Truong, Tim Lenz, Duc Anh Do, Ahmed Martban, and Eva Wiese
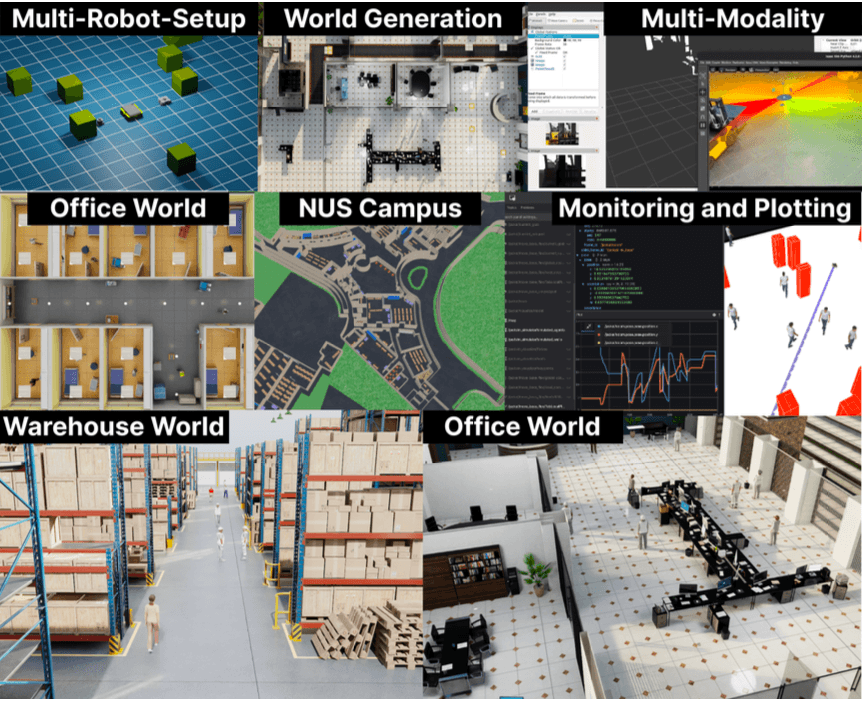
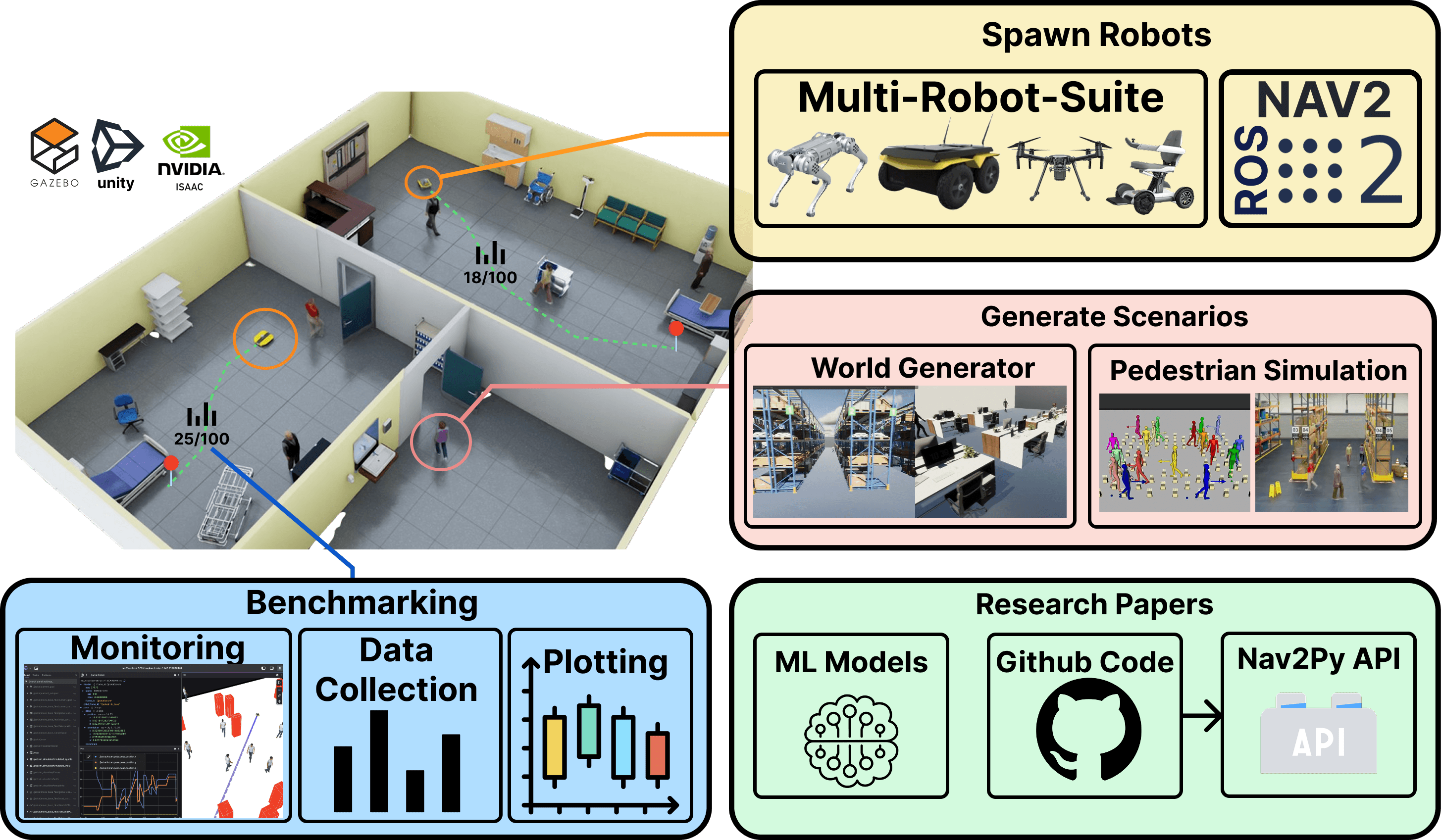
Arena-Rosnav 5.0: A Photorealistic ROS2 Simulation Framework for Developing and Benchmarking Social Navigation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Tim Lenz, Nam Truong Tran, Ahmed Martban, and Harold Soh
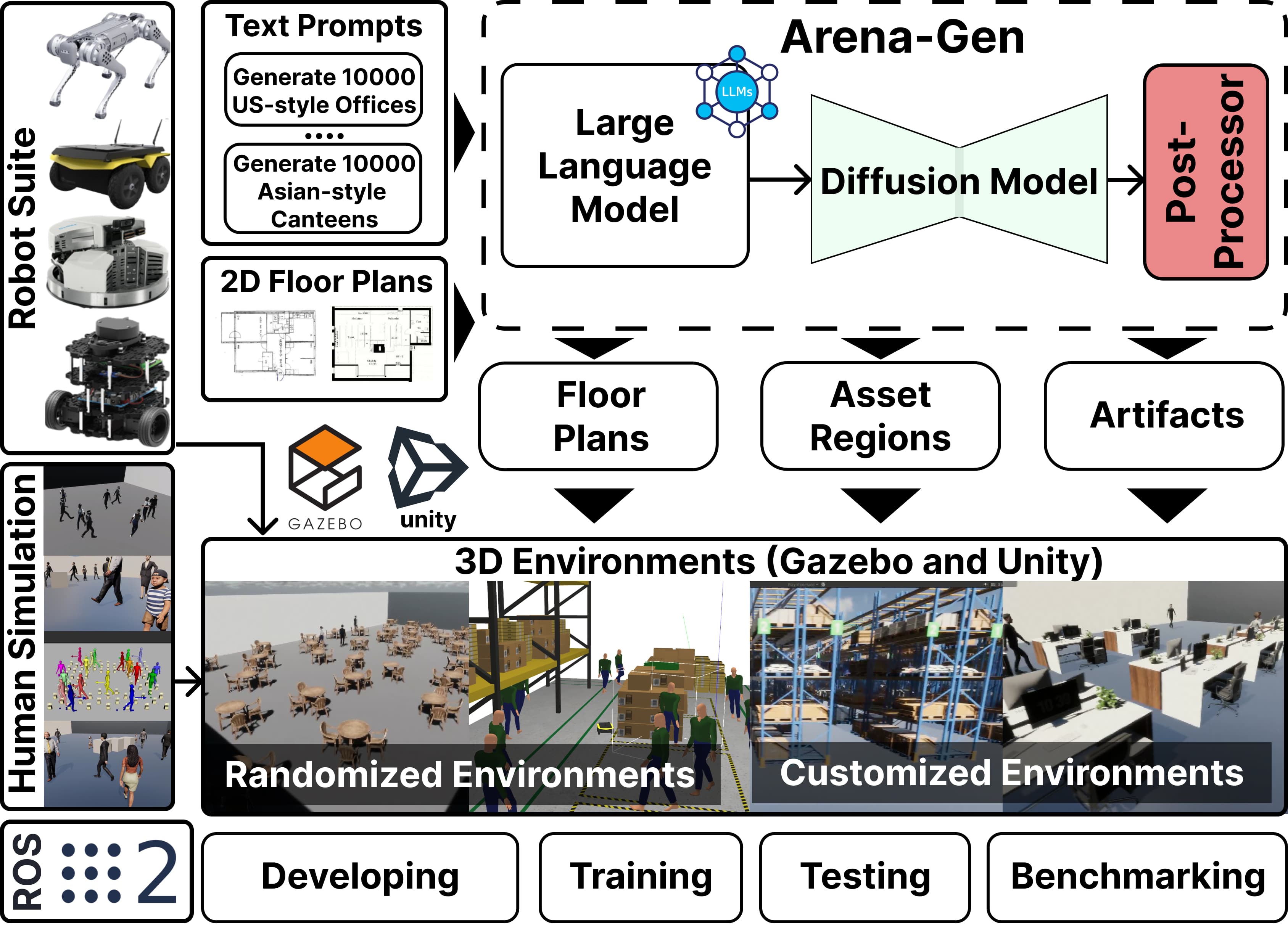
Arena-Rosnav 4.0: A Comprehensive ROS2 Platform for Human-Centric Navigation and AI-Enhanced Environment Generation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Maximilian Ho-Kyoung Schreff, Tim Lenz, Nam Truong Tran, Diego Diaz, Ahmed Martban, Jonas Kreutz, and Harold Soh
Latest from ARENA Lab
3 papers accepted at IROS 2026!
Three papers from ARENA Lab have been accepted at IEEE/RSJ IROS 2026. Huge congratulations to all authors — see you in the venue!
Linh leading organizing team for IROS 2026 Social Navigation Workshop
Linh Kästner is leading the organizing committee for the Social Navigation Workshop at IROS 2026. The workshop will bring together researchers working on socially-aware robot navigation.
Welcome Diego Diaz — incoming PhD student (2027)
Diego Diaz will be joining ARENA Lab as an incoming PhD student starting 2027. Diego has already contributed as a co-author on Arena-Rosnav 3.0 and 4.0.
Ready to Shape the Future of Robotics?
Join a team of passionate researchers working at the intersection of AI, robotics, and human-centered design.