Research Publications
Our team has contributed over 50 papers at top robotics venues — primarily ICRA, IROS, RSS, and RA-L. More recently we are also preparing submissions to NeurIPS, CVPR, ICML, and ICLR on our latest work on world models and Vision-Language-Action (VLA) models.
Arena-Bench 2.0: A Comprehensive Benchmark of Social Navigation Approaches in Collaborative Environments
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Jiaming Wang, Nhan Trinh, Zhengchen Shen, Giang Nguyen Huu Truong, Tim Lenz, Duc Anh Do, Ahmed Martban, and Eva Wiese
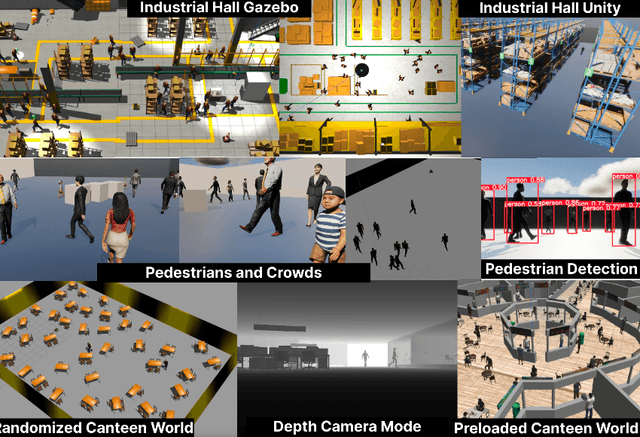
Arena-Rosnav 5.0: A Photorealistic ROS2 Simulation Framework for Developing and Benchmarking Social Navigation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Tim Lenz, Nam Truong Tran, Ahmed Martban, and Harold Soh
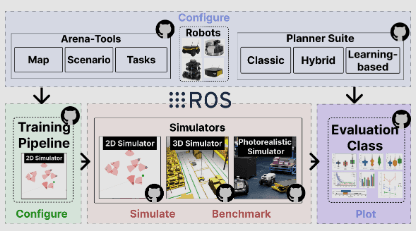
Arena-Rosnav 4.0: A Comprehensive ROS2 Platform for Human-Centric Navigation and AI-Enhanced Environment Generation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Maximilian Ho-Kyoung Schreff, Tim Lenz, Nam Truong Tran, Diego Diaz, Ahmed Martban, Jonas Kreutz, and Harold Soh
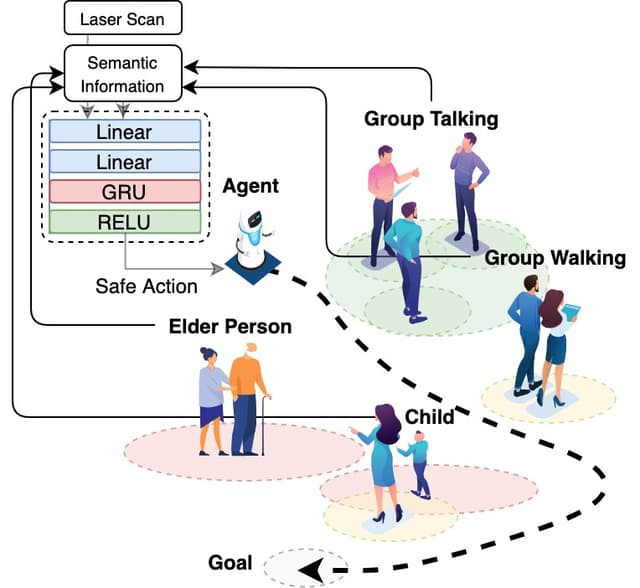
Arena-Rosnav 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Linh Kästner, Volodymyr Shcherbyna, Huajian Zeng, Tuan Anh Le, Maximilian Ho-Kyoung Schreff, Halid Osmaev, Nam Truong Tran, Diego Diaz, Jan Golebiowski, Harold Soh, Jens Lambrecht
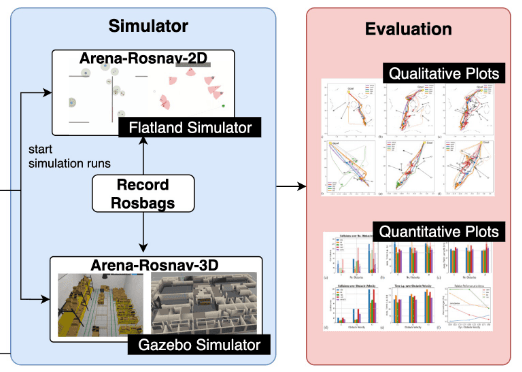
Arena-Rosnav 2.0: A Development and Benchmarking Platform for Robot Navigation in Highly Dynamic Environments
Linh Kästner, Reyk Carstens, Huajian Zeng, Jacek Kmiecik, Tuan Anh Le, Teham Bhuiyan, Boris Meinardus, Jens Lambrecht

Arena-Web: A Web-based Development and Benchmarking Platform for Autonomous Navigation Approaches
Linh Kästner, Reyk Carstens, Christopher Liebig, Volodymyr Shcherbyna, Lena Nahrworld, Subhin Lee, Jens Lambrecht
Spotlight talk + one of six demos in main hall
Arena-Bench: A Benchmarking Suite for Obstacle Avoidance Approaches on Highly Dynamic Environments
Linh Kästner, Teham Buiyan, Tuan Anh Le, Reyk Carstens, Duc Pichel, Jacek Kmiecik, Elias Treis, Boris Meinardus, Bassel Fatloun, Niloufar Khorsadhi, Jens Lambrecht

Arena-Rosnav: Towards Deployment of Deep-RL-Based Obstacle Avoidance into Conventional Autonomous Navigation Systems
Linh Kästner, Teham Buiyan, Xinlin Zhao, Lei Jiao, Zhengcheng Shen, Tuan Anh Le and Jens Lambrecht


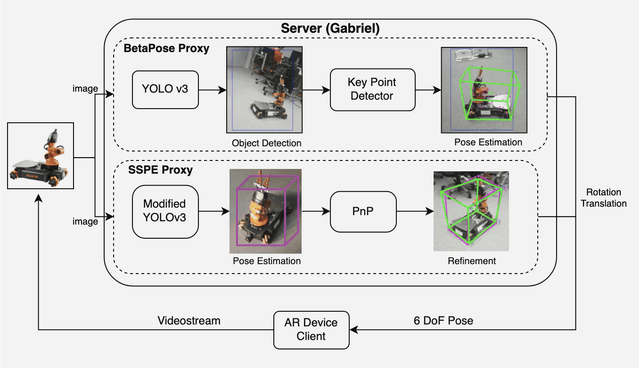
A 3D-Deep-Learning-based Augmented Reality Calibration Method for Robotic Environments
Linh Kästner, Vlad Frasineanu, Jens Lambrecht