Papers
Research Papers
Peer-reviewed papers published by our lab at top venues including ICRA, RSS, IROS, NeurIPS, and more.
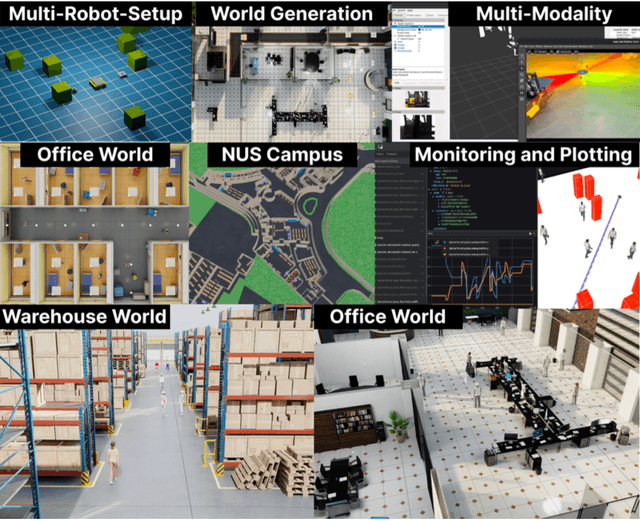
Arena-Rosnav 5.0: A Photorealistic ROS2 Simulation Framework for Developing and Benchmarking Social Navigation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Tim Lenz, Nam Truong Tran, Ahmed Martban, and Harold Soh
Robotics Science and Systems 2025, Los Angeles, USA2025-04-01
PhotorealisticROS2Simulation
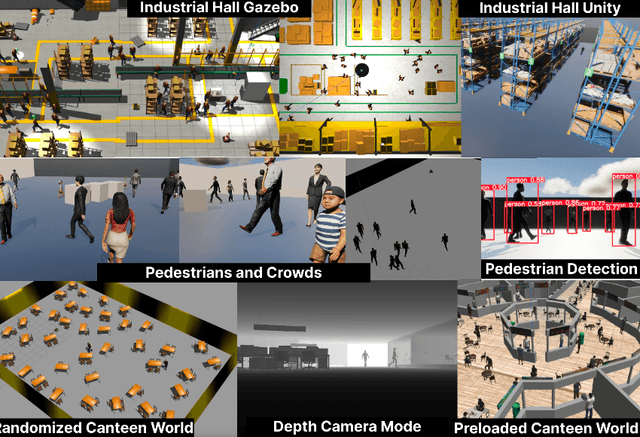
Arena-Rosnav 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Linh Kästner, Volodymyr Shcherbyna, Huajian Zeng, Tuan Anh Le, Maximilian Ho-Kyoung Schreff, Halid Osmaev, Nam Truong Tran, Diego Diaz, Jan Golebiowski, Harold Soh, Jens Lambrecht
Robotics Science and Systems 2024, Delft, Netherlands2024-02-01
Social NavigationCollaborationDynamics

Arena-Web: A Web-based Development and Benchmarking Platform for Autonomous Navigation Approaches
Linh Kästner, Reyk Carstens, Christopher Liebig, Volodymyr Shcherbyna, Lena Nahrworld, Subhin Lee, Jens Lambrecht
Robotics: Science and Systems 2023, Daegu, Korea2023-03-01
Web PlatformDevelopmentBenchmarking
Spotlight talk + one of six demos in main hall


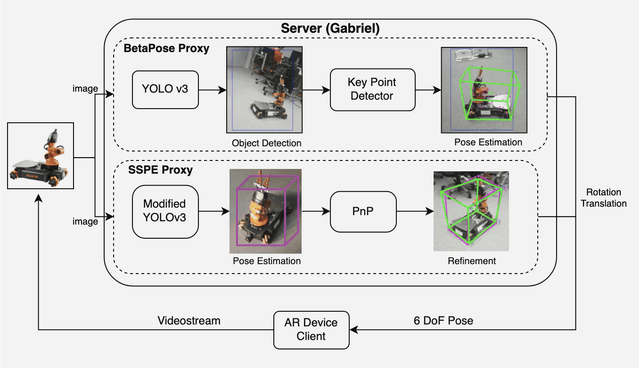
A 3D-Deep-Learning-based Augmented Reality Calibration Method for Robotic Environments
Linh Kästner, Vlad Frasineanu, Jens Lambrecht
IEEE ICRA 2020, Paris, FranceICRA2020-05-01
ARDeep LearningCalibration