← Back to Team
Tuan Anh Le
PhD Student
tuananh.le@smu.edu.sg
About
Researching robot learning and multi-agent coordination for navigation in dynamic environments. Co-author on multiple Arena-Rosnav papers.
Research Interests
Robot LearningMulti-Agent RLNavigation
Mentored by
Linh Kästner
Publications (4)

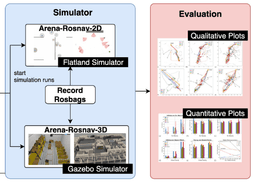
Arena-Rosnav 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Linh Kästner, Volodymyr Shcherbyna, Huajian Zeng, Tuan Anh Le, Maximilian Ho-Kyoung Schreff, Halid Osmaev, Nam Truong Tran, Diego Diaz, Jan Golebiowski, Harold Soh, Jens Lambrecht
Robotics Science and Systems 2024, Delft, Netherlands2024-02-01
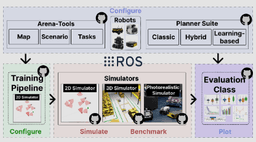
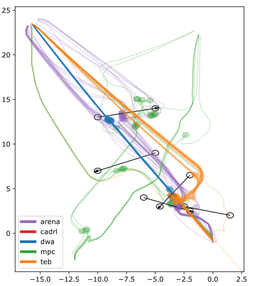
Arena-Bench: A Benchmarking Suite for Obstacle Avoidance Approaches on Highly Dynamic Environments
Linh Kästner, Teham Buiyan, Tuan Anh Le, Reyk Carstens, Duc Pichel, Jacek Kmiecik, Elias Treis, Boris Meinardus, Bassel Fatloun, Niloufar Khorsadhi, Jens Lambrecht
IEEE RA-L + IROS 2022, Kyoto, Japan2022-10-01
Interested in collaborating?
Reach out to Tuan Anh Le or apply to join ARENA Lab.