← Back to Team
Huajian Zeng
PhD Student, TUM
About
Key contributor to Arena-Rosnav platform across multiple versions.
Research Interests
SimulationBenchmarkingROS2
Publications (5)
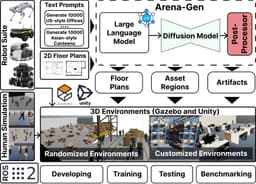
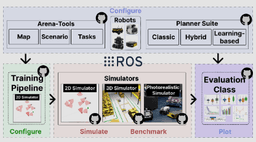
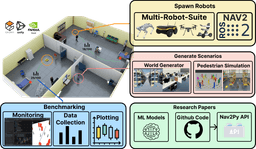
Arena-Rosnav 4.0: A Comprehensive ROS2 Platform for Human-Centric Navigation and AI-Enhanced Environment Generation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Maximilian Ho-Kyoung Schreff, Tim Lenz, Nam Truong Tran, Diego Diaz, Ahmed Martban, Jonas Kreutz, and Harold Soh
IEEE ICRA 2025, Atlanta, USA2024-09-01

Arena-Rosnav 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Linh Kästner, Volodymyr Shcherbyna, Huajian Zeng, Tuan Anh Le, Maximilian Ho-Kyoung Schreff, Halid Osmaev, Nam Truong Tran, Diego Diaz, Jan Golebiowski, Harold Soh, Jens Lambrecht
Robotics Science and Systems 2024, Delft, Netherlands2024-02-01
Arena-Bench 2.0: A Comprehensive Benchmark of Social Navigation Approaches in Collaborative Environments
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Jiaming Wang, Nhan Trinh, Zhengchen Shen, Giang Nguyen Huu Truong, Tim Lenz, Duc Anh Do, Ahmed Martban, and Eva Wiese
IROS 2025, Hangzhou, China2025-10-01
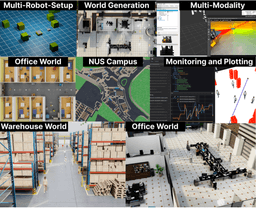
Arena-Rosnav 5.0: A Photorealistic ROS2 Simulation Framework for Developing and Benchmarking Social Navigation
Volodymyr Shcherbyna, Linh Kästner, Huajian Zeng, Giang Nguyen Huu Truong, Tim Lenz, Nam Truong Tran, Ahmed Martban, and Harold Soh
Robotics Science and Systems 2025, Los Angeles, USA2025-04-01